资料下载
步进电机基础知识:类型、用途和工作原理
发布时间:2023-11-03 02:52:59 来源:体育竞猜bob本文将为您介绍步进电机的基础知识,包括其工作原理、构造、操控方法、用途、类型及其优缺点。
步进电机是一种通过步进(即以固定的角度移动)方式使轴旋转的电机。其内部构造使它无需传感器,通过简单的步数计算即可获知轴的确切角位置。这种特性使它适用于多种应用。
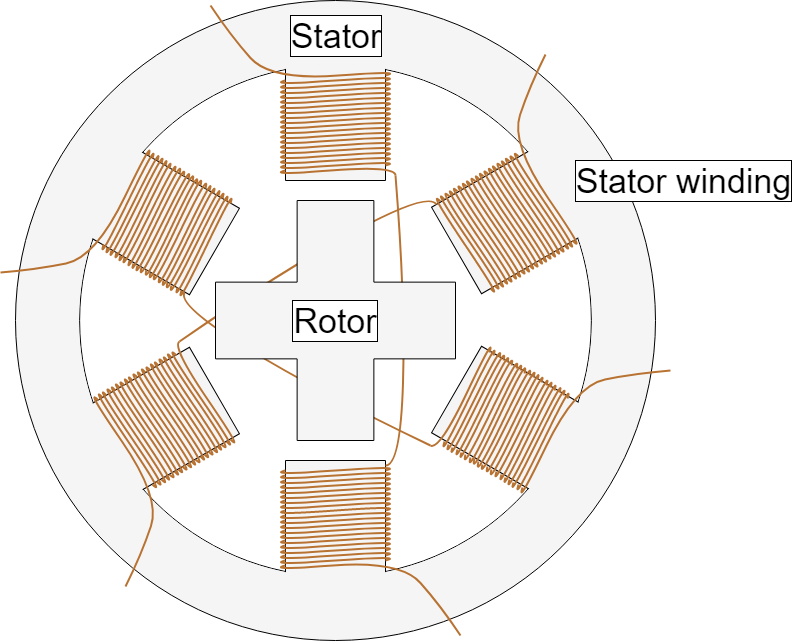
与所有电机一样,步进电机也包括固定部分(定子)和活动部分(转子)。定子上有缠绕了线圈的齿轮状突起,而转子为 永磁体或可变磁阻铁芯。稍后我们将更深入地介绍不同的转子结构。图1显示的电机截面图,其转子为可变磁阻铁芯。
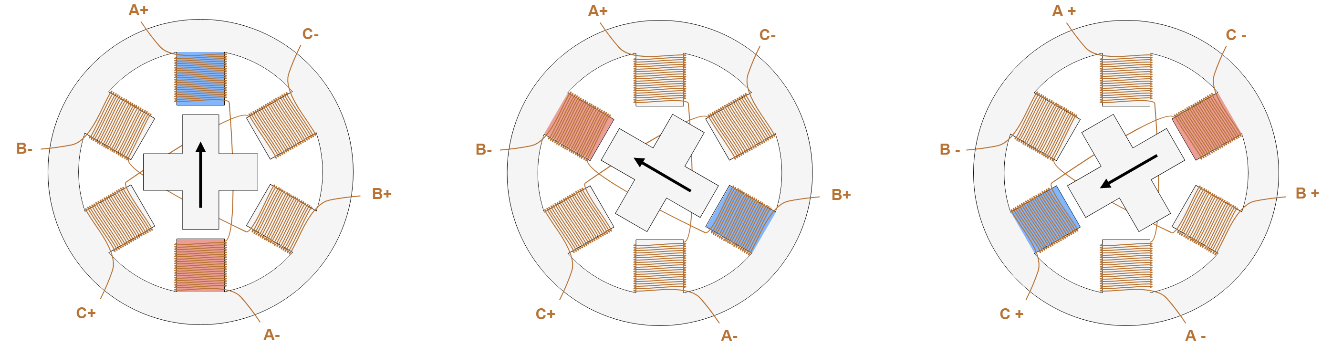
步进电机的基本工作原理为:给一个或多个定子相位通电,线圈中通过的电流会产生磁场,而转子会与该磁场对齐;依次给不同的相位施加电压,转子将旋转特定的角度并最终到达需要的位置。图2显示了其工作原理。首先,线圈A通电并产生磁场,转子与该磁场对齐;线圈B通电后,转子顺时针旋转60°以与新的磁场对齐;线圈C通电后也会出现同样的情况。下图中定子小齿的颜色指示出定子绕组产生的磁场方向。
步进电机的性能(无论是分辨率/步距、速度还是扭矩)都受构造细节的影响,同时,这一些细节也有一定可能会影响电机的控制方式。实际上,并非所有步进电机都具有相同的内部结构(或构造),因为不同电机的转子和定子配置都不同。
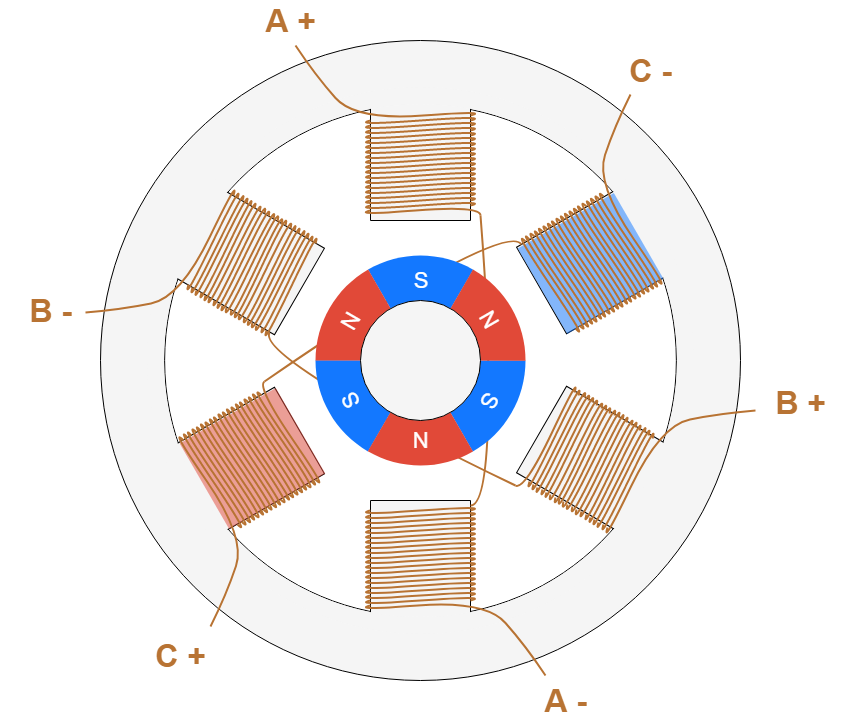
• 永磁转子:转子为永磁体,与定子电路产生的磁场对齐。这种转子能够保证良好的扭矩,并具有制动扭矩。这在某种程度上预示着,无论线圈是否通电,电机都能抵抗(即使不是很强烈)位置的变化。但与其他转子类型相比,其缺点是速度和分辨率都较低。图3显示了永磁步进电机的截面图。
• 可变磁阻转子:转子由铁芯制成,其形状特殊,可以与磁场对齐(请参见图1和图2)。这种转子更容易实现高速度和高分辨率,但它产生的扭矩通常较低,并且没有制动扭矩。
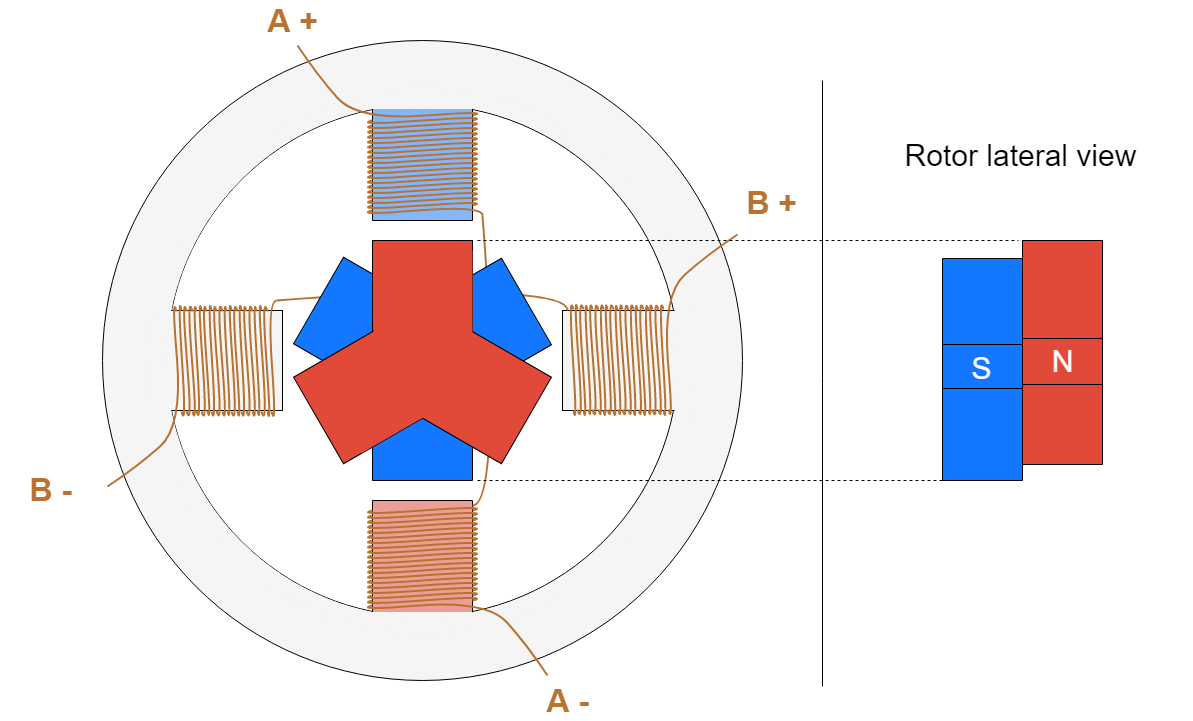
• 混合式转子:这种转子具有特殊的结构,它是永磁体和可变磁阻转子的混合体。其转子上有两个轴向磁化的磁帽,并且磁帽上有交替的小齿。这种配置使电机同时具有永磁体和可变磁阻转子的优势,尤其是具有高分辨率、高速度和大扭矩。当然更高的性能要求意味着更复杂的结构和更高的成本。图3显示了这种电机结构的简化示意图。线圈A通电后,转子N磁帽的一个小齿与磁化为S的定子齿对齐。与此同时,由于转子的结构,转子S磁帽与磁化为N的定子齿对齐。尽管步进电机的工作原理是相同的,但实际电机的结构更复杂,齿数要比图中所示的更多。大量的齿数可以使电机获得极小的步进角度,小至0.9°。
定子是电机的一部分,负责产生转子与之对齐的磁场。定子电路的主要特性与其相数、极对数以及导线配置相关。 相数是独立线圈的数量,极对数则表示每相占用的主要齿对。两相步进电机最常用,三相和五相电机则较少使用(请参见图5和图6)。
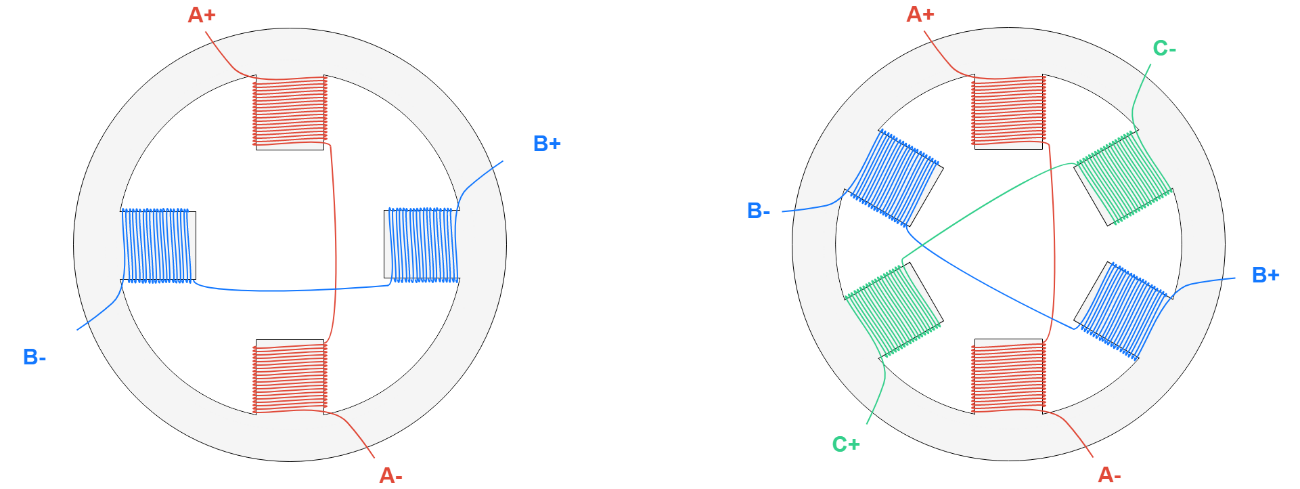
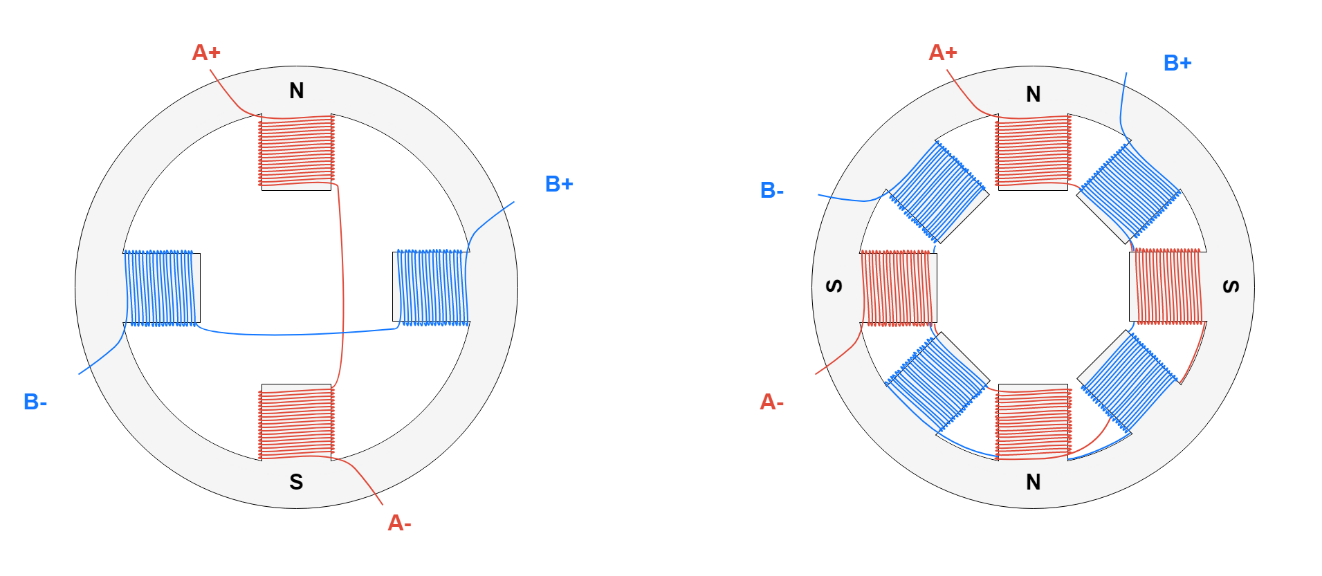
图6:两相单极定子(左)和两相双极定子(右)。在A +和A-之间施加正电压时产生的磁场用字母N和S表示。
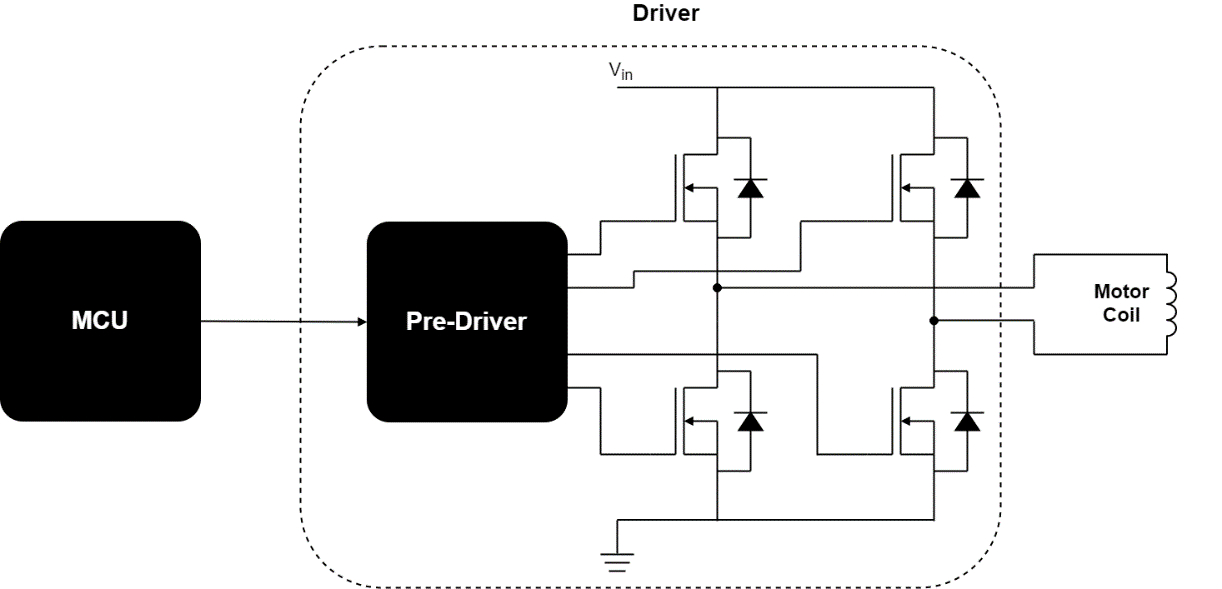
从上文我们大家都知道,电机线圈需要按特定的顺序通电,以产生转子将与之对齐的磁场。可以向线圈提供必要的电压以使电机正常运行的设备有以下几种(从距离电机更近的设备开始):
晶体管桥:从物理上控制电机线圈电气连接的设备。晶体管可以看作是电控断路器,它闭合时线圈连接到电源,线圈中才有电流通过。每个电机相位都需要一个晶体管电桥。
MCU:通常由电机用户编程控制的微控制器单元,它为预驱动器生成特定信号以获得所需的电机行为。
图7为步进电机控制方案的简单示意图。预驱动器和晶体管电桥可以包含在单个设备中,即驱动器。
市面上有各种不同的 步进电机驱动器,它们针对特定应用具有不一样的功能。但其最重要的特性之一与输入接口有关,最常见的几种输入接口包括:
Step/Direction (步进/方向) –在Step引脚上发送一个脉冲,驱动器即改变其输出使电机执行一次步进,转动方向则由Direction引脚上的电平来决定。
Phase/Enable(相位/使能)–对每相的定子绕组来说,Enable决定该相是否通电, Phase决定该相电流方向,。
步进电机驱动器的另一个重要特性是,除了控制绕组两端的电压,它是否还能控制流过绕组的电流:
拥有电压控制功能,驱动器能调节绕组上的电压,产生的扭矩和步进速度仅取决于电机和负载特性。
电流控制驱动器更先进,因为它们能调节流经有源线圈的电流,更好地控制产生的扭矩,从而更好地控制总系统的动态行为。
另一个可能对电机控制产生影响的特性是其定子线圈的布置,它决定了电流方向的变化方式。为实现转子的运动,不仅要给线圈通电,还要控制电流的方向,而电流方向决定了线圈本身产生的磁场方向(见图8)。
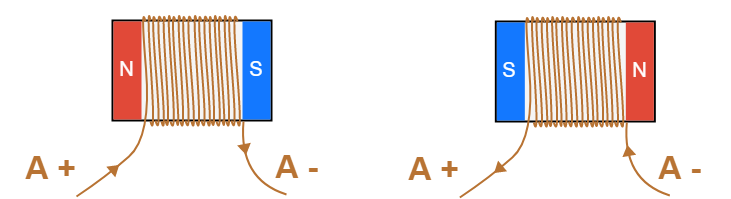
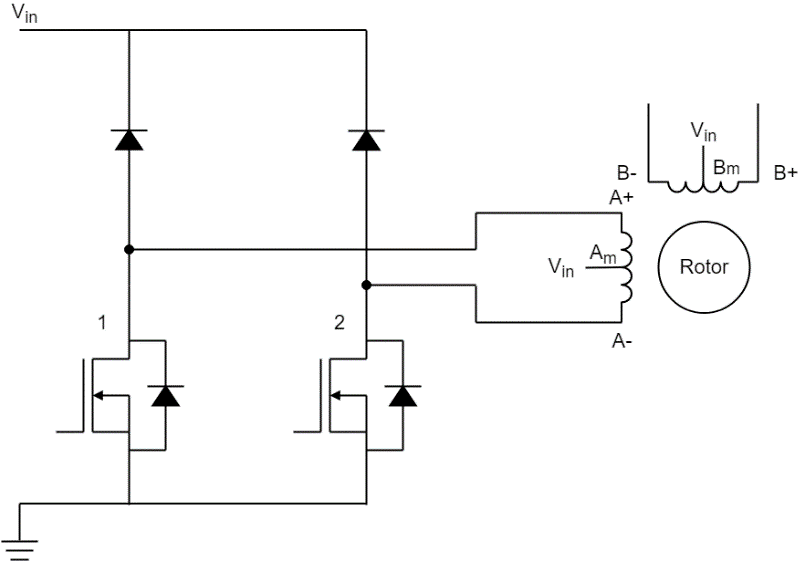
在单极步进电机中,线圈的中心点连有一根引线),这样做才能够通过相对简单的电路和组件来控制电流方向。该中央引线(AM)连接输入电压VIN(见图8)。如果MOSFET1导通,则电流从AM流向A +。如果MOSFET 2导通,则电流从AM流向A-,在相反方向上产生磁场。如上所述,这种方法可以简化驱动电路(仅需要两个半导体),但缺点是一次仅使用了电机中铜导体的一半,这意味着如果线圈中流过相同的电流 ,则磁场强度仅为使用全部铜导体时的一半。另外,由于电机输入引线更多,这类电机较难构造。
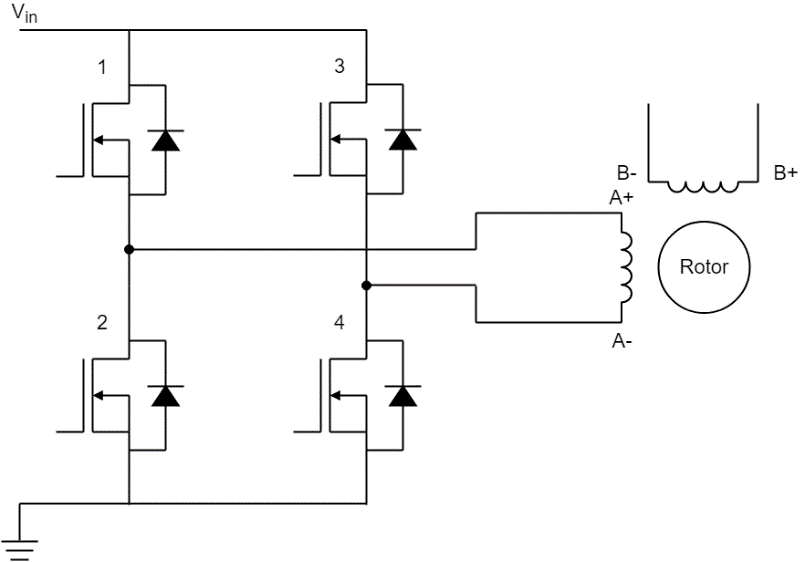
在双极步进电机中,每个线圈只有两条引线,而且为了控制方向,必须使用H桥(请参见图10)。如图8所示,如果MOSFET 1和4导通,则电流从A +流向A-;如果MOSFET 2和3导通,则电流从A-流向A +,产生相反方向的磁场。这种方案需要更复杂的驱动电路,但可以最大限度利用电机铜量而实现最大扭矩。
随着技术的不断进步,单极电机的优势逐步弱化,双极步进电机成为目前最流行的电机类型。
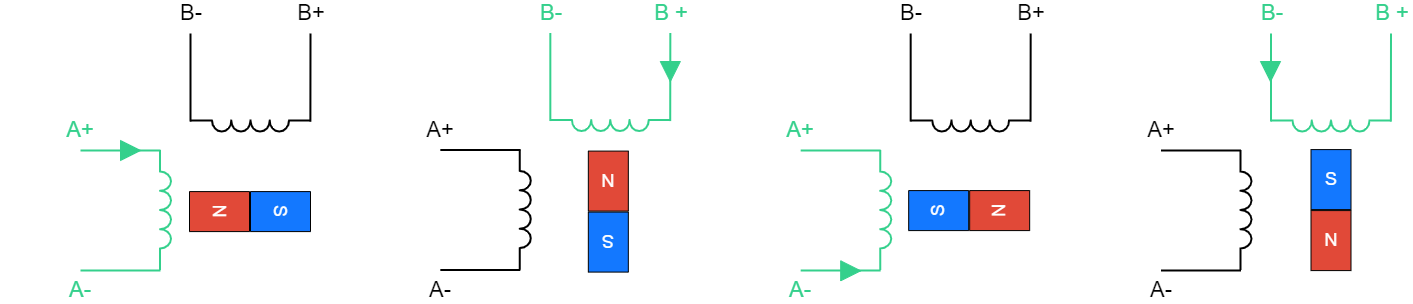
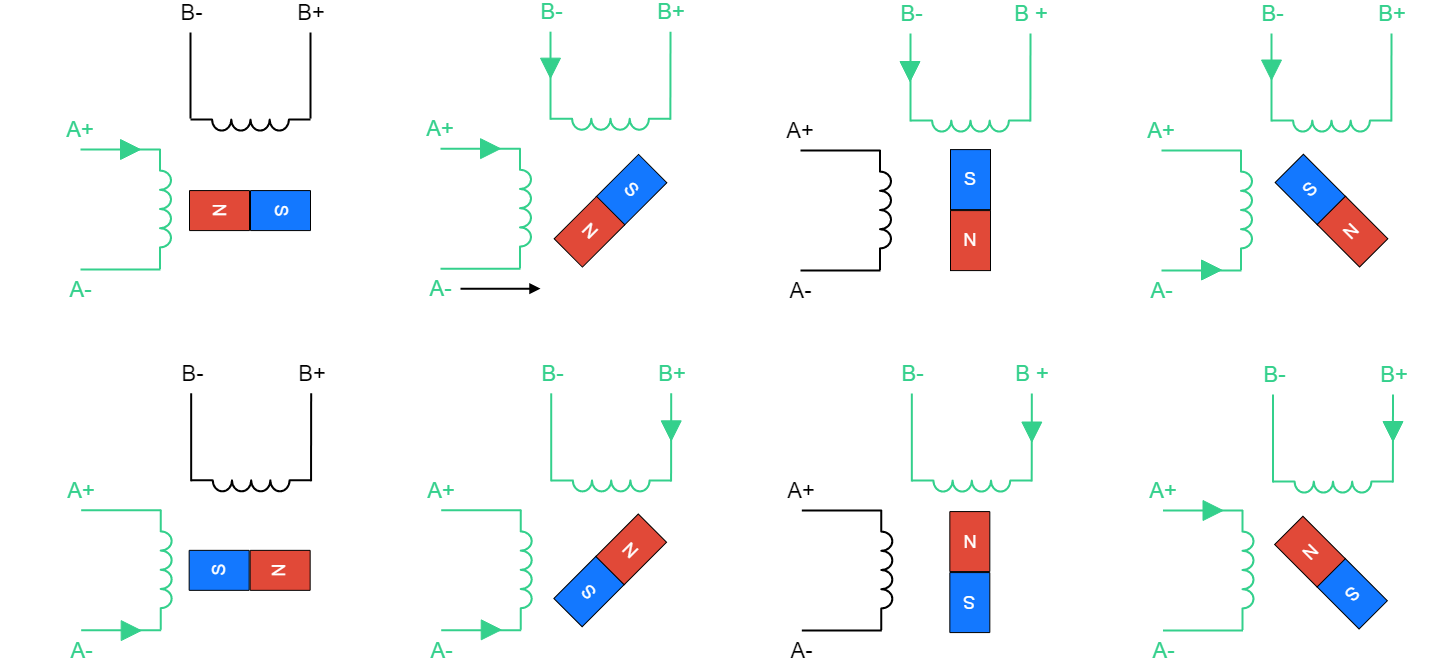
• 波动模式:一次仅一个相位通电(见图11)。为简单起见,如果电流从某相的正引线流向负引线(例如,从A +到A-),则我们称为正向流动;否则,称为负向流动。从下图左侧开始,电流仅在A相中正向流动,而用磁体代表的转子与其所产生的磁场对齐。接着,电流仅在B相中正向流动,转子顺时针旋转90°以与B相产生的磁场对齐。随后,A相再次通电,但电流负向流动 ,转子再次旋转90°。 最后,电流在B相中负向流动,而转子再次旋转90°。
全步模式:两相始终同时通电。图12显示了该驱动模式的步进步骤。其步骤与波动模式类似,最大的区别在于,全步模式下,由于电机中流动的电流更多,产生的磁场也更强,因此扭矩也更大。
半步模式是波动模式和全步模式的组合(请参见图12)。这种模式可以将步距减小一倍(旋转45°,而不是90°)。其唯一的缺点是电机产生的扭矩不是恒定的,当两相都通电时扭矩较高,只有一相通电时扭矩较小。
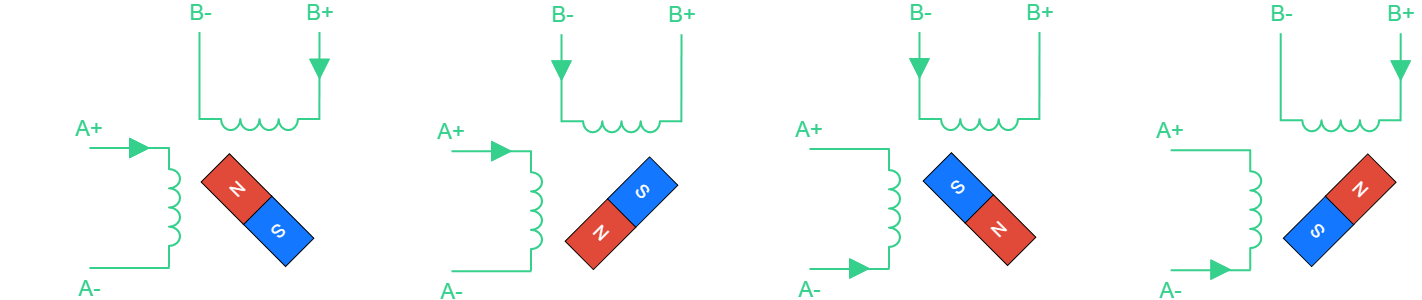
• 微步模式:可以看作是半步模式的增强版,因为它可以进一步减小步距,并且具有恒定的扭矩输出。这是通过控制每相流过的电流强度来实现的。与其他方案相比,微步模式需要更复杂的电机驱动器。图14显示了微步模式的工作原理。假设IMAX是一个相位中能够最终靠的最大电流,则从图中左侧开始,在第一个图中IA = IMAX,IB = 0。下一步,控制电流以达到IA = 0.92 x IMAX,IB = 0.38 x IMAX,它产生的磁场与前一个磁场相比顺时针旋转了22.5°。控制电流达到不一样的电流值并重复此步骤,将磁场旋转45°、67.5°和90°。与半步模式相比,它将步距减少了一半;但还能够大大减少更多。使用微步模式能够达到非常高的位置分辨率,但其代价是需要更复杂的设备来控制电机,并且每次步进产生的扭矩也更小。扭矩与定子磁场和转子磁场之间的夹角正弦成正比;因此,当步距较小时,扭矩也较小。这有一定的概率会导致丢步,也就是说,即使定子绕组中的电流发生了变化,转子的位置也可能不改变。

现在我们已了解了步进电机的工作原理,再总结一下各类电机的优缺点将非常有帮助。
得益于其内部结构,步进电机不需要传感器来检测电机位置。步进电机是通过执行“步进”来运动的,因此只需简单地计算步数就能够得到给定时间的电机位置。
此外,步进电机的控制格外的简单。它也需要驱动器,但不需要复杂的计算或调整即可正常工作。与其他电机相比,其控制工作量通常很小。而且,如果采用微步模式,还能轻松实现高达0.007°的位置精度。
步进电机在低速时可提供良好的扭矩,也能很好的保持位置,而且常规使用的寿命长。
• 当负载扭矩过高时可能会失步。由于无法获知电机的实际位置,因此会对控制产生负面影响。采用微步模式时更易产生此问题。
• 步进电机即使在静止时也总是消耗最大电流,因此会降低效率并可能会引起过热。
总而言之,当您需要成本低廉、易于控制的解决方案,且对高速时的效率和扭矩要求不高时,步进电机是最好的选择。
要了解如何为您的项目选择正确的电机类型,并进一步了解步进电机、有刷电机和无刷电机之间的区别,请单击 此处。
新闻中心
联系我们()
联系人:张建国
手机:13127676008
电话:13127676008
邮箱:shkonghong@qq.com
地址:上海市金山区枫泾镇环东一路65弄11号1802室